
Primero desearles un muy feliz año nuevo a todos, y que este sea mucho mejor que el 2010!
Que viva el 2011! deciamos la semana pasada, pero ahora, poniendo nuevamente los pies en la realidad, y luego de unos muy merecidos dias libres (respondiendo únicamente a las emergencias tecnológicas), toca volver a las labores cotidianas con más energÃa y ganas que nunca.
De novedades, la principal es que el robot de mi tesis al fin se encuentra ya en movimiento. Luego de un análisis de la cinemática directa e inversa, mucha geometrÃa, cálculo matricial, redes neuronales, matlab, scilab, visual basic, mucho red bull y una que otra bielita, al parecer todo va tomando forma.
[HTML1]
Este robot, para los que no andan muy al tanto del proyecto, es una Plataforma Stewart fabricada enteramente en aluminio, carbono y algo de plástico. Es una plataforma movil con 6 grados de libertad, cuyo movimiento es activado por servos de alto torque (en el video solo estamos probando 3, ya que para probar el resto, tengo que conectar mi transmisor para los aviones de radiocontrol, que tiene 6 canales), pero aparte de una pequeña desviación en los ángulos de los servos de la base (por eso se ve una pequeña inclinación en uno de los ejes en lugar de un desplazamiento plano), se mueve correctamente.
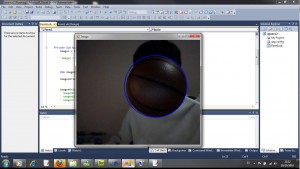
Ahora, para que una plataforma movil? La idea de este proyecto es que la placa movil, pueda balancear un objeto (en nuestro caso, una pequeña pelota), y para esto es necesario algún mecanismo de medición de la posición de dicha pelota en el espacio. Para esto estamos usando visión artificial.
Muchos de los proyectos realizados usando visión artificial, se basan en el reconocimiento de objetos, y con este marco hemos aplicado dicha teorÃa, para realizar visión artificial en tiempo real. Usando cámaras de video de alta velocidad, podemos detectar la posición de la pelota en la plataforma, y predecir su trayectoria, para con estos datos, mover la plataforma de tal manera que estabilice la pelota en el centro. Mas detalles de los algoritmos de visión artificial en los próximos dÃas.
Deja una respuesta
Lo siento, debes estar conectado para publicar un comentario.