
Como vieron hace un par de semanas, estuve diseñando un transmisor de radio control de 4 canales, de 2.4Ghz de frecuencia, para actualizar mi transmisor básico (un Hobbyking de 6 canales).
La idea es que el Arduino se encargue de todo lo que concierne a la lectura de los potenciómetros, inversión de la dirección de los servos (en los casos que se requiera), ajuste de máximos y mínimos, y la generación de la señal PPM, que se enviará al módulo de RF original del transmisor donante.
Actualmente, el programa simple que hice, mantiene memoria para 5 modelos (almacenados en la eeprom del microcontrolador), controla la dirección de los servos, y dual rates para cada canal.
El circuito del transmisor es el siguiente:
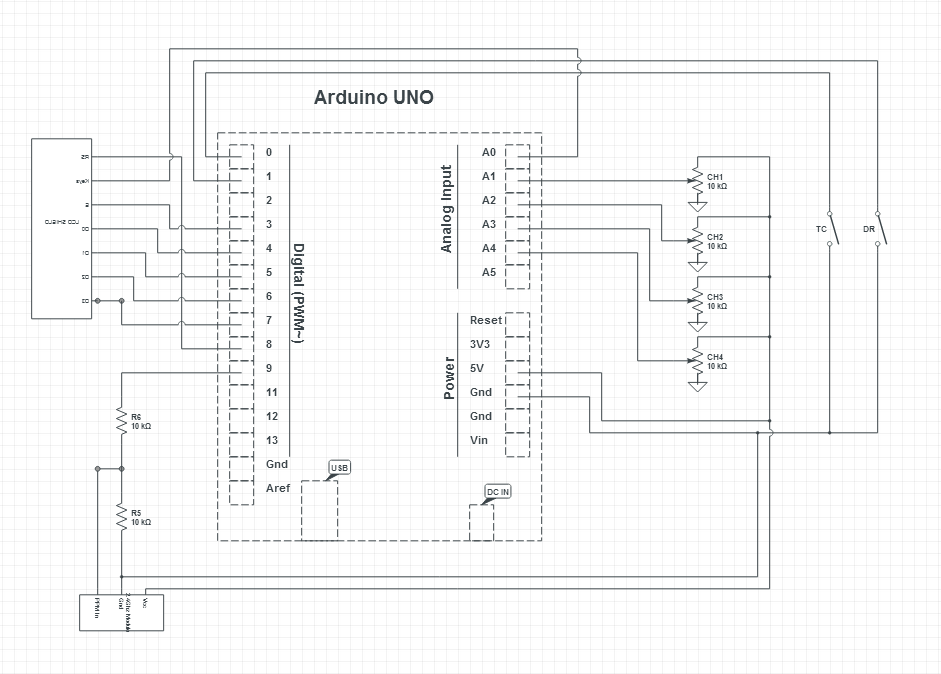
Como podemos observar, el circuito es bastante simple. El arduino va conectado a un shield de LCD+teclado para la visualización y comando de los menus; los 4 potenciómetros son los que van en las palancas de mando, los 2 interruptores son los de Throtle Cut (apaga los motores directamente) y para el Dual Rate, y la señal PPM es generada en el pin 9 del Arduino, desde donde se la conecta al módulo de 2.4Ghz.
El transmisor funciona a la perfección. Hoy hice un pequeño vuelo de prueba, y no hubo interferencias ni pérdidas de señal.
El código fuente, y la librería RC, necesaria para el cálculo y generación de los pulsos PPM, los pueden descargar de los siguientes enlaces:
- Librería RC (descomprimirla dentro de la carpeta Libraries de Arduino)
- ArduTransmisor
El código puede ser mejorado, pero para desoxidarme un poco en la programada de microcontroladores, funciona bién.
Les dejo un video de las últimas pruebas, antes del vuelo.
[HTML1]
Deja una respuesta
Lo siento, debes estar conectado para publicar un comentario.