
Les dejo mi último video editado, con tomas un poco antiguas (del 2009) de nuestras camionetas de radio control. Ojo que todas esas camionetas maltratadas siguen en perfecto estado! Que se diviertan
[HTML1]
18f4550 328 adc arduino arm avion bici china code cortex cuenca debian ecuador Electrónica energia facebook fpv gobierno launchpad lcd led linux onboard patolin pi ppm Programacion quad radiocontrol raspberry rc robot robótica servos shield stellaris stewart timer tmart transmisor twitter uno USB video wordpress
Les dejo mi último video editado, con tomas un poco antiguas (del 2009) de nuestras camionetas de radio control. Ojo que todas esas camionetas maltratadas siguen en perfecto estado! Que se diviertan
[HTML1]
Si tuvieras una tablet, la usarÃas más que tu computador de escritorio o laptop para perder el tiempo en el internet? SI!! y no eres el único.
Xataka ha realizado una encuesta, preguntando justamente eso «Â¿A quién está matando tu tablet? Queremos saber«, y estos son los resultados:

Como vemos, el computador personal es el mas afectado, ya que la grán mayoria contestó que para el uso común y silvestre del internet, usan su tablet. Será que llegamos a eso algún dÃa acá tambien? En lo personal, despues del trabajo, si quiero consultar algo, yo si uso la tablet cuestion de gustos. Que opinan ustedes?
Les muestro un pequeño video de avión construido desde cero, completamente hecho de espumaflex y silicon caliente. Si les dá el ancho de banda, les recomiendo visualizarlo en HD.
[HTML1]
Este avión está basado en los planos del EPParasol, que lo pueden encontrar en este link.
Luego de algunos ajustes en el controlador, hemos logrado que nuestra plataforma stewart balancee la pelota , a continuación un pequeño video de su funcionamiento
[HTML1]
Después de todo el estress de una semana fregada, me fuà a volar un ratito. Aquà el video
[HTML1]
Primero desearles un muy feliz año nuevo a todos, y que este sea mucho mejor que el 2010!
Que viva el 2011! deciamos la semana pasada, pero ahora, poniendo nuevamente los pies en la realidad, y luego de unos muy merecidos dias libres (respondiendo únicamente a las emergencias tecnológicas), toca volver a las labores cotidianas con más energÃa y ganas que nunca.
De novedades, la principal es que el robot de mi tesis al fin se encuentra ya en movimiento. Luego de un análisis de la cinemática directa e inversa, mucha geometrÃa, cálculo matricial, redes neuronales, matlab, scilab, visual basic, mucho red bull y una que otra bielita, al parecer todo va tomando forma.
[HTML1]
Este robot, para los que no andan muy al tanto del proyecto, es una Plataforma Stewart fabricada enteramente en aluminio, carbono y algo de plástico. Es una plataforma movil con 6 grados de libertad, cuyo movimiento es activado por servos de alto torque (en el video solo estamos probando 3, ya que para probar el resto, tengo que conectar mi transmisor para los aviones de radiocontrol, que tiene 6 canales), pero aparte de una pequeña desviación en los ángulos de los servos de la base (por eso se ve una pequeña inclinación en uno de los ejes en lugar de un desplazamiento plano), se mueve correctamente.
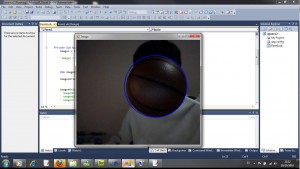
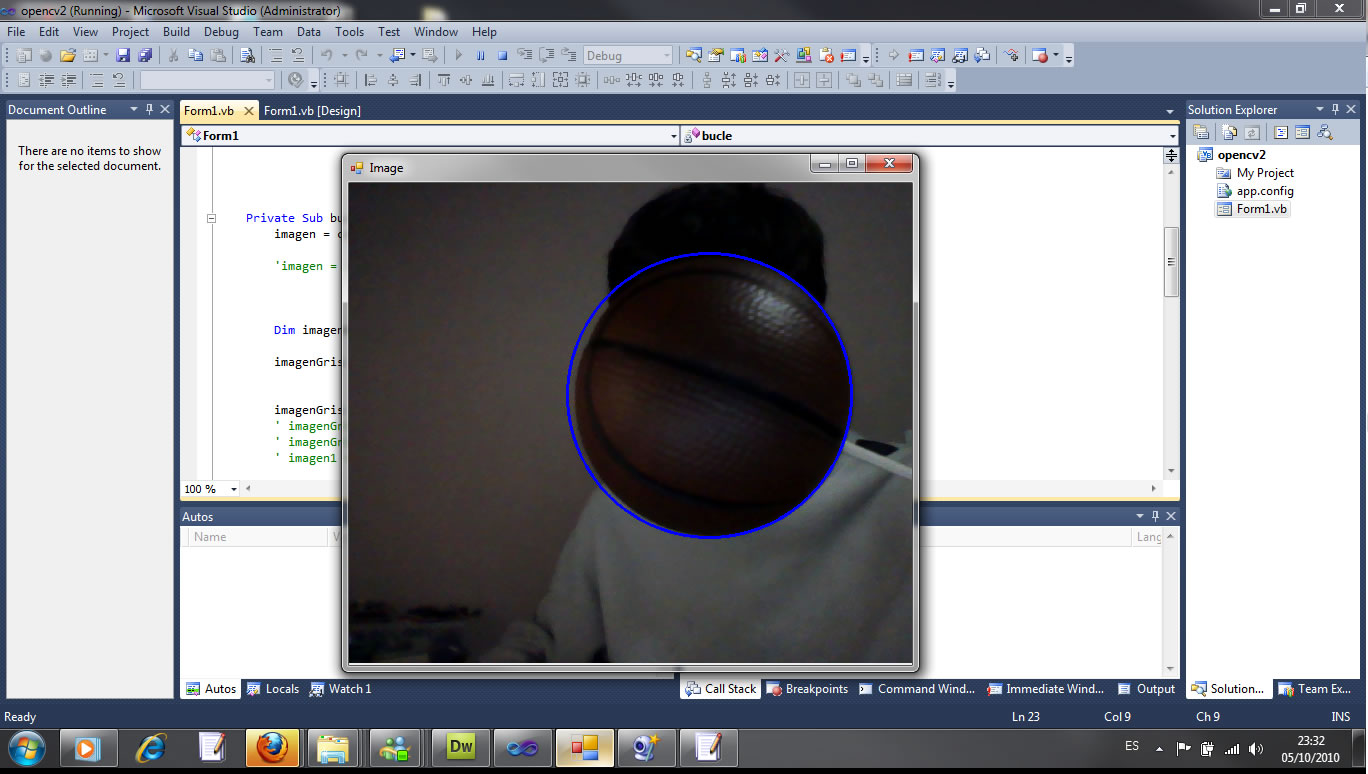
Ahora, para que una plataforma movil? La idea de este proyecto es que la placa movil, pueda balancear un objeto (en nuestro caso, una pequeña pelota), y para esto es necesario algún mecanismo de medición de la posición de dicha pelota en el espacio. Para esto estamos usando visión artificial.
Muchos de los proyectos realizados usando visión artificial, se basan en el reconocimiento de objetos, y con este marco hemos aplicado dicha teorÃa, para realizar visión artificial en tiempo real. Usando cámaras de video de alta velocidad, podemos detectar la posición de la pelota en la plataforma, y predecir su trayectoria, para con estos datos, mover la plataforma de tal manera que estabilice la pelota en el centro. Mas detalles de los algoritmos de visión artificial en los próximos dÃas.
Luego de mucha prueba y error, he logrado detectar objetos redondos, mediante visión artificial. Ahora si a enlazar al robot. Proximamente más explicaciones al respecto!
Luego de algunos años dedicado a las camionetas de radio control, me he puesto a probar los aviones de control remoto, y les muestro algunas fotos de mi ultima creacion, que resulta la primera que lleva ya 10 vuelos y sigue de una sola pieza (el primer intento de avión voló por 3 segundos antes de caer y despedazarse)
Si alguien resulta interesado en este avión, podrÃa hacer unos planos para que lo fabriquen, ya que en realidad el costo es bajÃsimo. Sin contar la electrónica (radio, receptor, servos y motor), el avión cuesta menos de $10 en materiales, y lo fabriqué en un par de dÃas (podrÃan ser un par de horas jeje). El «fusejale»Â plano es de balsa, y las alas son armadas con capas de platos desechables, reforzadas con barras de fibra de vidrio y carbono.
Proximamente mostraré videos de su vuelo. No es un modelo acrobático, mas bien es un modelo de entrenamiento, facil de volar (de hecho vuela solo, al darle potencia al motor), y ya ha hecho algunos loops grandes sin despedazarse en el aire.
Subo unas fotos de mi robot paralelo, ya va avanzando la tesis! Queda por terminar la tarjeta de control de los servos para empezar las pruebas del software de control.
![]()
Estrenamos digipartes! En esta tienda online podrán conseguir componentes electrónicos y electromecánicos para aplicaciones robóticas, y a precios muy competitivos.
Estaremos incrementando nuestro stock de items, y siempre brindaremos soluciones para todas sus aplicaciones de electrónica, además de contar con noticias y proyectos electrónicos para todos.
Esperamos sus novedades y comentarios en http://www.digipartes.com