
Les dejo unos videos de las mangas finales, de la Copa LRP en Cuenca, Ecuador
Novatos
Intermedios
Expertos
18f4550 328 adc arduino arm avion bici china code cortex cuenca debian ecuador Electrónica energia facebook fpv gobierno launchpad lcd led linux onboard patolin pi ppm Programacion quad radiocontrol raspberry rc robot robótica servos shield stellaris stewart timer tmart transmisor twitter uno USB video wordpress
Les dejo unos videos de las mangas finales, de la Copa LRP en Cuenca, Ecuador
Novatos
Intermedios
Expertos

Pues un hack rápido.
Quería conectar mi transmisor de RC al computador, para poder usar los simuladores de radio control, especialmente el VRC Pro, usando los componentes que tenía a la mano.
Tenía una placa Digispark, que usa un micro ATTINY85 emulando un dispositivo Joystick HID. Conectándolo al receptor RC podemos usar la pistola del transmisor, como un joystick en el computador (inalámbrico!) y usarlo dentro del simulador.
El código fuente, y el esquema de conexión , se encuentran en mi repositorio de github https://github.com/patolin/rc-receiver-joystick
Mis amigos en www.tmart.com han sido muy amables en enviarme un nuevo microcóptero. Cuando pensaba que no podían hacer algo más pequeño aún, aparece esto! La miniaturización al máximo nivel!

Este microquad, dentro del paquete contiene:
El microquad vino en una cajita bastante peculiar (dentro de un sobre pequeño, para ahorrar gastos de envío), y al verlo inicialmente, más parece una caja de un juguete pequeño, que de una aeronave RC. El quad viene en la parte superior, y el transmisor en la parte inferior de la caja transparente. El empaque es bastante delicado, pero con suerte no hubo ningún daño durante el envío.

Antes de iniciar el vuelo, recuerden que esto no es un juguete!, a pesar de ser muy pequeño y simpático (el modelo es un clon del DJI phantom, pero a escala 1:16) sus helices giran a muy altas velocidades, y podrían causar alguna herida en caso de tener contacto con la piel cuando estén en movimiento. Vale recalcar que para cualquier tipo de multirotor que se vuele en interiores, debe cuidarse que exista el espacio suficiente y que no existan obstáculos para su vuelo.
Luego de poner a cargarlo por unos 10 mins, y buscar un par de baterías AAA para el transmisor, lo primero que salta a la vista es lo pequeño de todo. El microquad como les mencionaba solo mide 4cm de lado, y el transmisor no mide mas de 6cm de longitud. El transmisor es bastante cómodo, y las palancas se ven bastante resistentes, pero eso no quita el efecto “juguete” que muestra por su pequeño tamaño. El transmisor tiene trims digitales para la palanca derecha, para ajustar el movimiento ya en vuelo.


Una vez que se ha cargado totalmente el microquad (se enciente la luz del conector USB del cargador), procedemos a encenderlo con el microswitch que se encuentra en la parte posterior, y encendemos a la vez en transmisor. Cuando la comunicación entre el transmisor y el microquad esté lista, el transmisor emitirá un bip de aviso, y en el microquad dejarán de parpadear los leds de cada rotor, quedando encendidos permanentemente.
Dado el pequeño tamaño del microquad, han sido muy inteligentes en colocar luces LED que facilitan su ubicación en el espacio. Además, las luces (2 azules adelante y 2 rojas atras) facilitan el control en el aire, indicando para donde se va a mover.
 Subimos la palanca de la velocidad y el microquad despega super rápido. Es super sensible a los comandos. los giros son bastante buenos y el cambio de dirección es rápido. Adicionalmente es super estable cuando no recibe ningun control desde el transmisor.
Subimos la palanca de la velocidad y el microquad despega super rápido. Es super sensible a los comandos. los giros son bastante buenos y el cambio de dirección es rápido. Adicionalmente es super estable cuando no recibe ningun control desde el transmisor.
Al ser tan pequeño, el punto débil del microquad son sus hélices. Lastimosamente, éstas, al entrar en contacto con una pared o algun objeto grande, se van a romper. Por suerte dentro del paquete se incluyen 2 hélices (una de cada sentido) para solventar un caso fortuito.
Como multicóptero de oficina funciona excelentemente. Intenté volarlo en exteriores, pero es imposible. Su escaso peso lo hace incontrolable con la brisa más leve 🙁 además, no sería muy optimista en la distancia a la que se perderá de vista volando en un parque o en el patio de la casa.
Como siempre, la curiosidad es mala consejera, y quise ver como es que algo tan complejo como un multirotor puede estar en un empaque tan pequeño, así que manos a la obra, a desarmarlo.

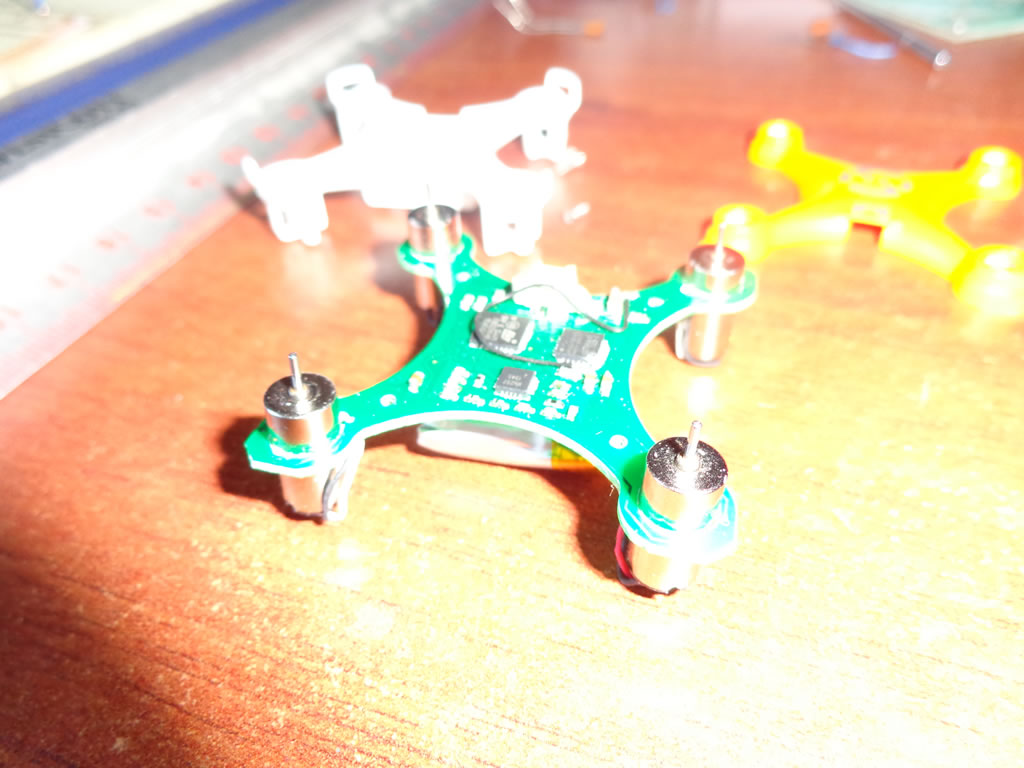
En sí, todo es miniaturizado. El microquad tiene un microcontrolador ST, un acelerómetro y el receptor de 2.4Ghz, todo en un circuito impreso que no mide más de 1cm2. El PCB se extiende hacia los lados y funciona como soporte de los motores, quedando únicamente la batería por debajo. Quizás para aligerar un poco el peso, podríamos deshacernos de la carcasa plástica y dejarlo “al desnudo”

Les dejo un video del vuelo en mi sala… resulta bastante complicado filmarlo por su pequeño tamaño, pero muy divertido de volarlo
[HTML1]
Les dejo algunos videos que he grabado, mientras probaba una action cam que conseguí a buen precio en ebay
En el stampede
[HTML1]
En la bici
[HTML2]
El día de hoy les voy a presentar la nueva nave que se ha sumado a mi flota de micro multicopteros a control remoto. Es un multicóptero UFO Y4, con control de 4 canales, a 2.4Ghz de frecuencia. Este multicoptero lo pueden encontrar en www.tmart.com, a un excelente precio, tomando en cuenta todo lo que incluye.

Este multicóptero viene empacado de tal manera, que llega totalmente protegido del maltrato que pudiera soportar durante el viaje desde la China. La caja no es demasiado grande (para evitar en lo posible costos en aduana), pero tiene suficiente espacio para proteger al multicóptero, al control remoto y a sus accesorios.
Dentro del paquete, se incluyen los siguientes items:
Lo único que debemos comprar antes de volar, son 4 baterías AA para el transmisor. Éste funciona sin problemas con baterías alcalinas. Hay que tomar en cuenta, el momento de desempacar el multicóptero, que las baterías, el cargador y los repuestos, se encuentran en una pequeña cajita en la parte trasera del soporte interno de la caja.



Como les comentaba, este multicóptero tiene una configuración Y4, es decir, lleva forma de Y, con 3 ejes de rotores, pero en la parte delantera tiene 2 motores que giran en sentido contrario para mantener la estabilidad.


Algo super práctico, especialmente para los principiantes, es que éste multicoptero tiene una armadura protectora que cubre las hélices, motores y electrónica del equipo. Con esto estamos relativamente a salvo de roturas en las hélices por choques contra paredes y obstáculos. La armadura es muy liviana y resistente, lo que contribuye a que la experiencia de vuelo sea muy buena, y para nada frustrante, como sucede con otros tipos de multicópteros.
En la parte inferior, se encuentra el soporte para las baterías, el cual las asegura para que no se caigan durante el vuelo. Además, en la parte inferior, se encuentra toda la lógica de control, receptor y giroscopios que hacen que el UFO se estabilice solo en el aire.


El transmisor es una versión mas pequeña de lo normal, de un transmisor de RC. Tiene 4 canales, un LCD bastante grande, pero poco útil, y 2 botones que sirven para seleccionar el modo de vuelo (Lo / Hi Rates) y el modo acrobático, donde el multicoptero realiza giros sobre sus ejes al movimiento de los controles. Ojo con este modo!!, puede causar un serio golpe si no se lo realiza en un lugar con el espacio adecuado. Los controles del transmisor son super suaves, el control es super liviano, en parte porque solo necesita 4 baterías AA, y tiene trims digitales, lo cual es un extra para un equipo de este precio.
Después de unos días de prueba de este multicoptero, podemos resumir sus características en lo siguiente:
Pros:
– Buen empaque protector, y disponibilidad de envío desde EEUU o China
– No se ve como un producto barato. Los acabados del multicoptero y del transmisor son excelentes. Las palancas del transmisor son suaves y precisas.
– El transmisor usa solo 4 baterías AA, y adicionalmente tiene un puerto USB que permite cargar al multicóptero (para esto se necesitan baterías recargables en el transmisor)
– El multicóptero es super estable gracias a sus giroscopios y sistemas de control. Lo hace muy facil de volar para principiantes
– En el paquete viene incluido todo, incluso hélices de repuesto
– Excelente precio (USD. $47, incluido el envío desde la china)
– Puede volar en exteriores, con viento moderado
Contras:
– En el sitio web del distribuidor, no existen partes de repuesto listadas. Pero en ebay se puede conseguir facilmente
– La estructura protectora es también la estructura mecánica del multicóptero. Un golpe extremadamente fuerte podría romperlo y destruir la unidad
Que tal vuela se preguntarán? Les dejo un pequeño y accidentado video de las pruebas. Cabe recalcar que despues de unas 2 semanas de vuelos en interiores y exteriores, el multicoptero sigue como nuevo!
[HTML1]
La gente de www.tmart.com fué muy amable en enviarme un minihelicóptero de 3.5 canales con control infrarojo, para realizar unas pruebas, así que les comentaré por acá mis experiencias con el mismo.
Hace algún tiempo, llegaron acá al Ecuador una oleada de microhelicópteros, que prometian mucho (facilidad de vuelo y durabilidad), pero la verdad es que no eran ni fáciles de volar, ni eran durables ni baratos. Mucha gente los compró y tuvieron un mal inicio en el hobbie del radio control, ya que estos helicópteros causaban mas frustración que diversión.
Es por esto que le dí una oportunidad a este helicóptero, así que vamos revisandolo.
Primero el empaque. Éste vino empacado de una manera muy profesional, con doble capa de envoltura de burbujas (grandes por fuera, pequeñas por dentro), con lo que se garantiza que el paquete arribará sano y salvo a la puerta de tu casa.


Por si no abrieron el link del producto (deberían hacerlo ahora), notarán que primero, este tiene un costo bajísimo (USD. $19,99) que incluye en envío gratis, ya sea desde las bodegas de EEUU, o desde la principal en la China. En mi caso el paquete fué enviado desde EEUU, y demoró algo más de 7 días en llegar a Cuenca. Tomen en cuenta que por la característica del artículo, éste debió pasar por aduana, lo que aumentó un pago de $5,00 el momento de la entrega, por gastos aduaneros.
Una vez abierto el paquete, lo primero que me gustó fué la calidad de la caja del mismo (está genial para ponerlo sobre una repisa, como adorno). El helicóptero y su control remoto vienen en una caja de acrílico transparente, que lo hace facil y seguro de transportar, por si quieres llevarlo fuera de casa
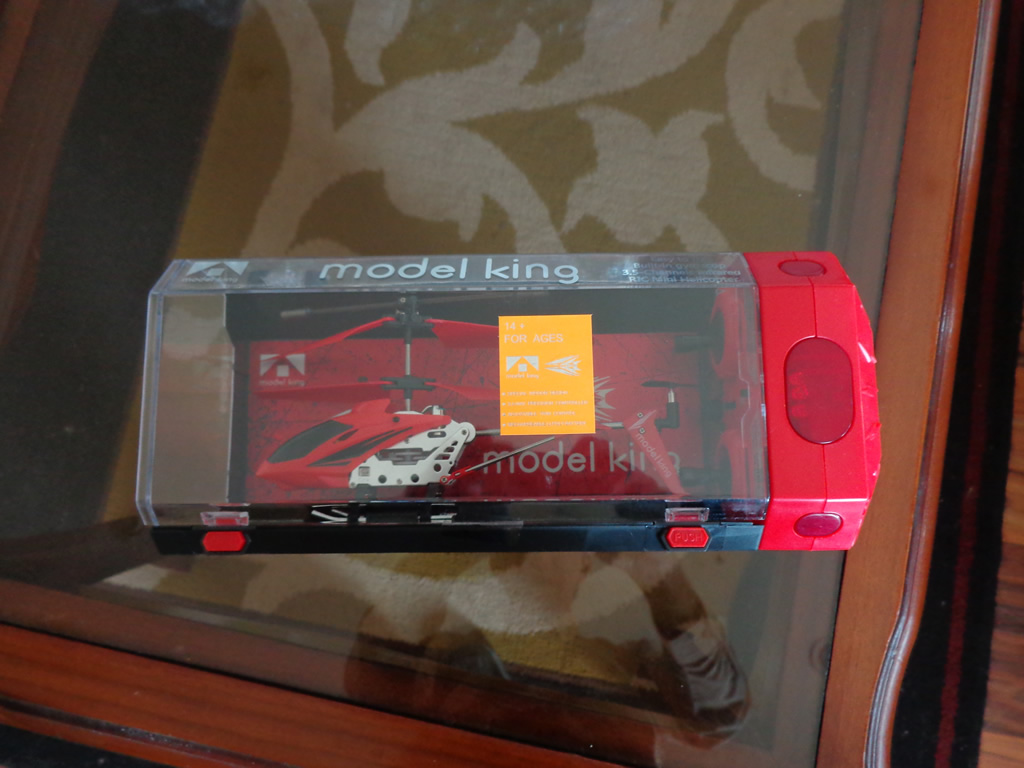
Para sacar al helicóptero de su caja, necesitarás un destornillador estrella pequeño, ya que el mismo tiene atornillada una base a su tren de aterrizaje. Esta medida me parece excelente porque lo asegura a la caja durante el viaje, evitando sorpresas en la entrega. Además, en la parte inferior de la caja, existe un pequeño compartimento (también asegurado con tornillos) que contiene el cable de carga USB, y una hélice trasera de repuesto (muy conveniente, para no truncar nuestros primeros vuelos experimentales)



Si algo puedo mencionar, es que el control remoto se ve algo «barato» comparado con el resto del paquete. Es de plástico rojo, y las palancas se las siente un poco débiles. El control tiene los mandos para la velocidad de giro de las hélices, rotación en el eje de la hélice, y para moverse adelante y atrás (throtle, rudder, elevator para los que conocen más de RC) y además, contiene una perilla para calibrar el giro del helicóptero, es decir, para mantenerlo estable en el aire. Aparte de los controles, existe un selector de canal, lo que nos da a pensar que podemos volar hasta 3 helicópteros a la vez, sin tener interferencia. El control remoto trabaja con luz infraroja, así que el rango de control es de máximo 5m en línea de vista, lo que es suficiente para volar en interiores. El transmisor usa 6 baterías AA, y además tiene un cable que permite cargar el helicóptero directo desde el control.


El helicóptero como tal, no tiene nada que ver con la calidad del control remoto. Éste está fabricado en aluminio y plástico, Excelente calidad de fabricación! Contiene 3 motores, la batería y toda la circuitería de control, incluido in giroscopio, que ayuda a estabilizarlo en el aire, facilitando su control


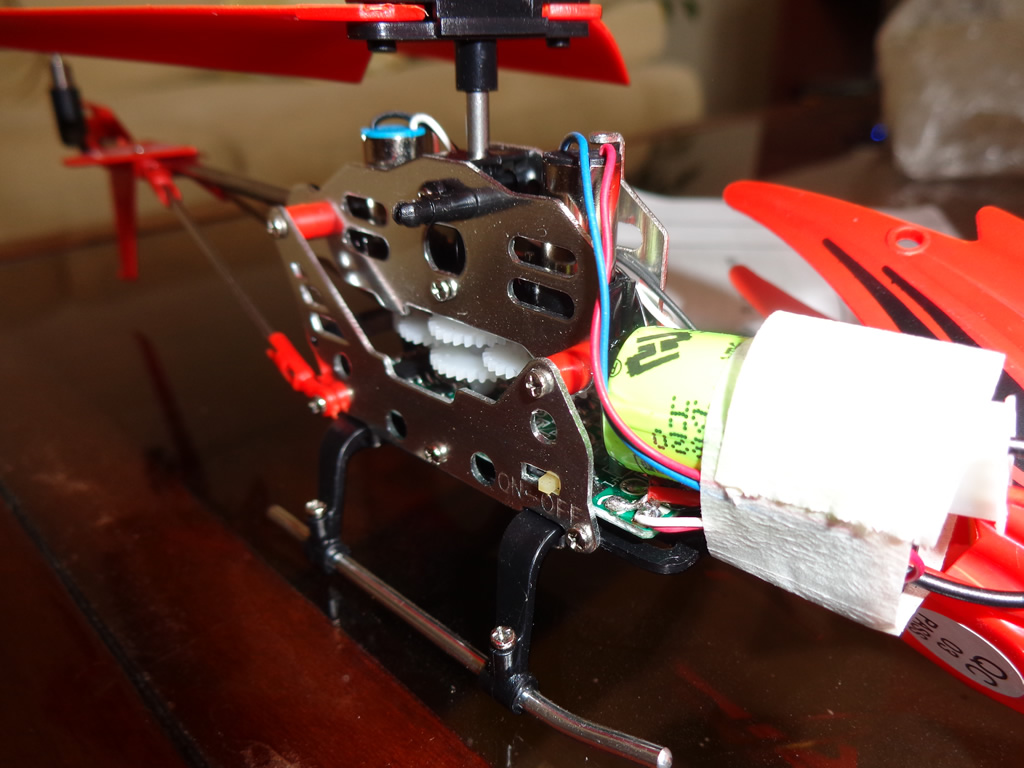
La batería incluida es de 150mah, lo que nos dá un tiempo de vuelo de unos 5 mins. Usando el cargador USB, demora de 10 a 12 mins en recargarse, lo que me gusta, porque he visto otros que necesitan casi 1 hora para recargar, y dan menos tiempo de vuelo.
Ahora la pregunta del millón: como vuela? Pues les digo que son los $19,99 que mejor pueden invertir en un helicóptero de este tipo. Inicialmente pensé «esto se va a estrellar y romper en el primer despegue» pero no! El helicóptero es super estable, los mandos no tienen una respuesta tan rápida, lo que ayuda en el control para los principiantes, y lo más importante, es muy muy resistente a los golpes. El truco es que, cuando veas tu helicoptero por estrellar, corta la potencia de las helices. Con eso caerá pero te asegurarás de no romper ningún engrane interno.
Resumiendo, y haciendo una comparativa, tenemos que:
A favor:
En contra:
Si desean echarle un ojo y comprarlo, este es el enlace http://www.tmart.com/3.5-Channel-Infrared-R-C-Mini-Helicopter-with-Gyro-Red_p136571.html . La compra es segura y el pago con paypal no presenta ningún problema. El momento del envío ellos envían un código de tracking del paquete, para que todo sea legal.
Y por si les queda la duda, les dejo un video de las pruebas de vuelo (ojo al final con los accidentes). Realmente es algo que puedo recomendar comprar a cualquiera que quiera probar iniciarse en el mundo de los helicópteros. La verdad es que con éstos, hay que empezar desde abajo 🙂
[HTML1]
Como vieron hace un par de semanas, estuve diseñando un transmisor de radio control de 4 canales, de 2.4Ghz de frecuencia, para actualizar mi transmisor básico (un Hobbyking de 6 canales).
La idea es que el Arduino se encargue de todo lo que concierne a la lectura de los potenciómetros, inversión de la dirección de los servos (en los casos que se requiera), ajuste de máximos y mínimos, y la generación de la señal PPM, que se enviará al módulo de RF original del transmisor donante.
Actualmente, el programa simple que hice, mantiene memoria para 5 modelos (almacenados en la eeprom del microcontrolador), controla la dirección de los servos, y dual rates para cada canal.
El circuito del transmisor es el siguiente:
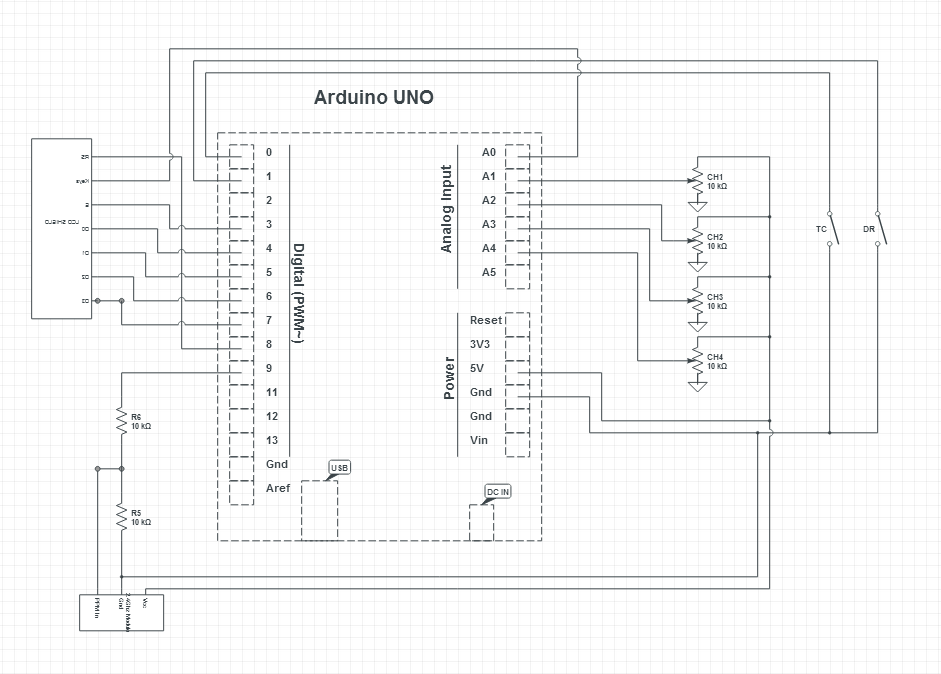
Como podemos observar, el circuito es bastante simple. El arduino va conectado a un shield de LCD+teclado para la visualización y comando de los menus; los 4 potenciómetros son los que van en las palancas de mando, los 2 interruptores son los de Throtle Cut (apaga los motores directamente) y para el Dual Rate, y la señal PPM es generada en el pin 9 del Arduino, desde donde se la conecta al módulo de 2.4Ghz.
El transmisor funciona a la perfección. Hoy hice un pequeño vuelo de prueba, y no hubo interferencias ni pérdidas de señal.
El código fuente, y la librería RC, necesaria para el cálculo y generación de los pulsos PPM, los pueden descargar de los siguientes enlaces:
El código puede ser mejorado, pero para desoxidarme un poco en la programada de microcontroladores, funciona bién.
Les dejo un video de las últimas pruebas, antes del vuelo.
[HTML1]